CODE: Coherence Based Decision Boundaries
for Feature Matching
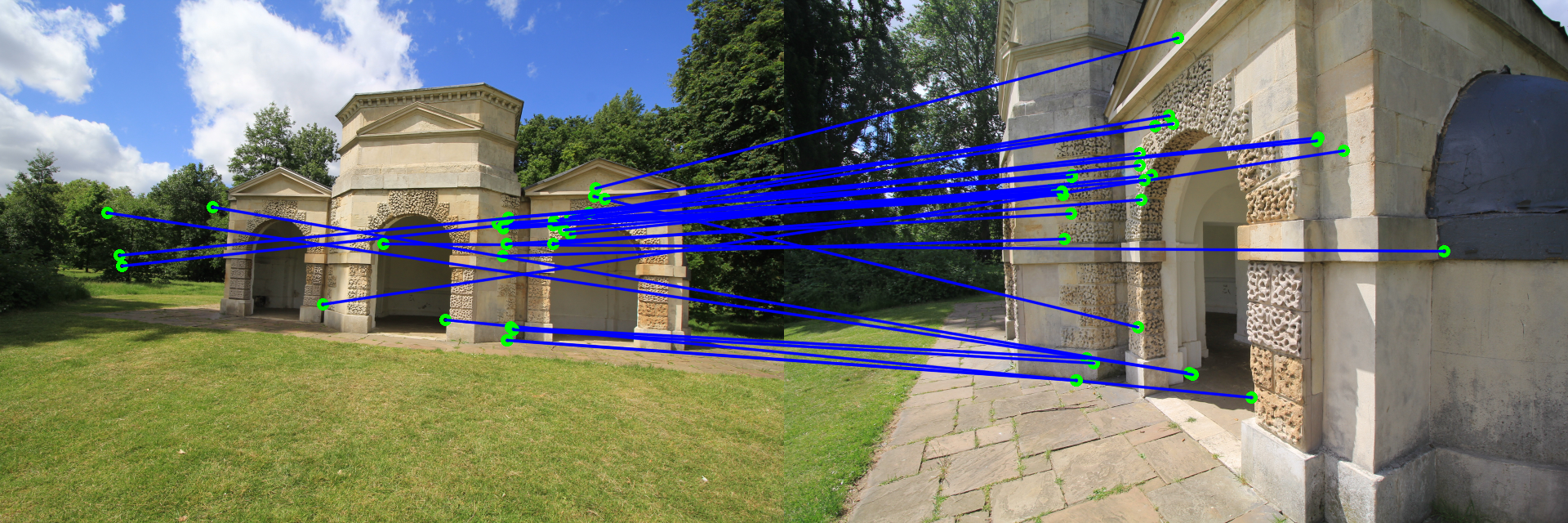 |
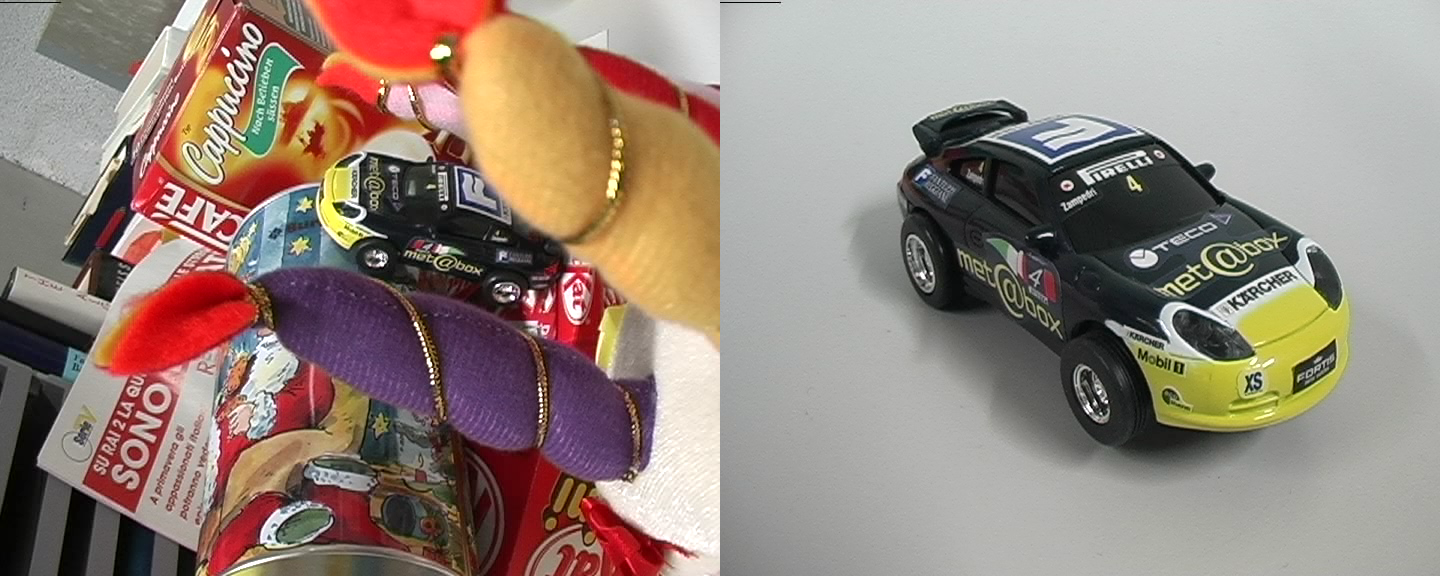
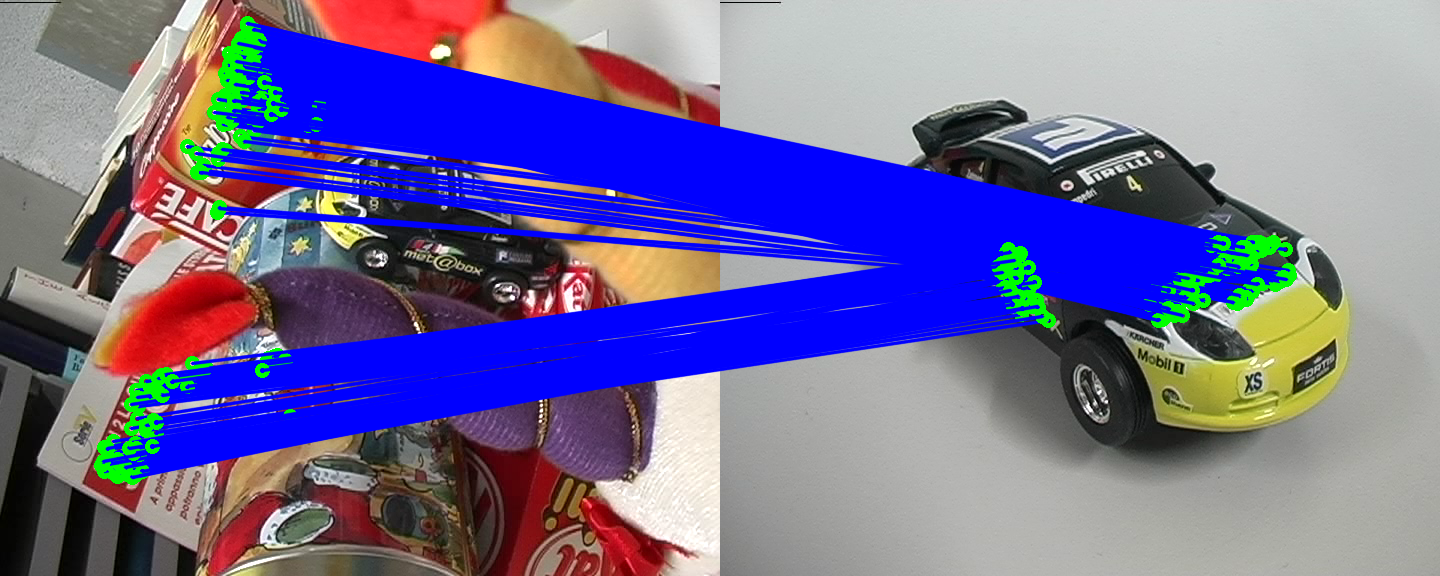
Traditional A-SIFT feature matching |
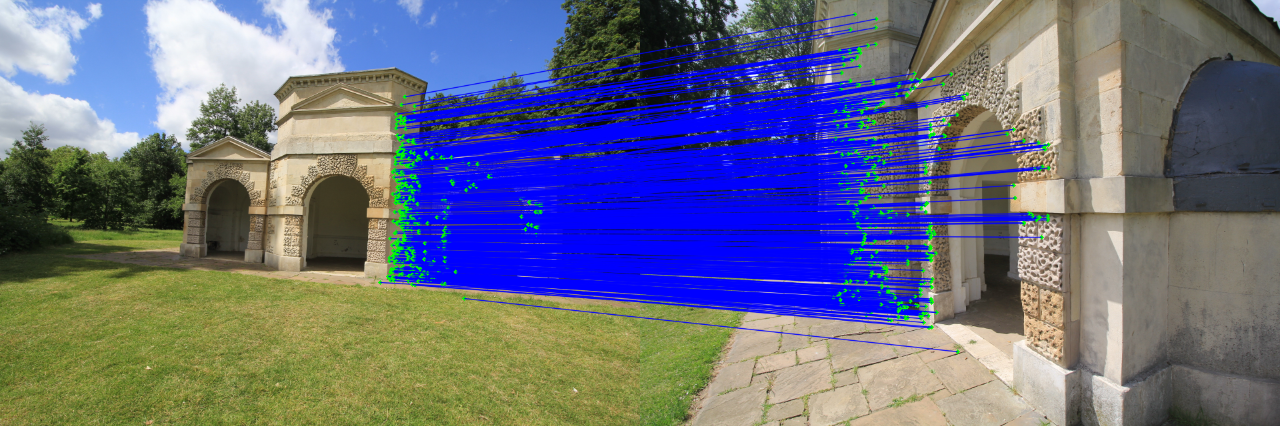 |
CODE feature correspondence with the same A-SIFT features |
Introduction
A key challenge in feature correspondence is the difficulty in differentiating true and false matches at a local descriptor level. This forces adoption of strict similarity thresholds that discard many true matches. However, if analysed at a global level, false matches are usually randomly scattered while true matches tend to be coherent (clustered around a few dominant motions), thus creating a coherence based separability constraint. This paper proposes a non-linear regression technique that can discover such a coherence based separability constraint from highly noisy matches and embed it into a correspondence likelihood model. Once computed, the model can filter the entire set of nearest neighbour matches (which typically contains over 90% false matches) for true matches. We integrate our technique into a full feature correspondence system which reliably generates large numbers of good quality correspondences over wide baselines where previous techniques provide few or no matches. Paper, C++ Code Libraries, 2010, 2013 Matlab Code
Idea
CODE matching is based on a simple observation. True matches tend to move in a coherent manner while wrong matches tend to be randomly scattered. This forms a motion consistency constraint which can be exploited to to differentiate true and false matches. To exploit this constraint, we develop an efficient non-linear regression which can rapidly compute a match constituency score from a very noisy set of feature matches. As the match consistency score takes the form of a continuous curve, it can be computed from a small set of matches and extrapolated across the entire image. This allows our CODE matching to scale to very large numbers of features.
To build a complete system, we integrate CODE matching with a powerful GPU A-SIFT feature matcher. The result is a highly effective wide-baseline feature matcher. Link to timing information A-SIFT.
Results
Visualisation |
Precision |
Recall |
F-number |
NRDC feature matching |
0.75 |
0.48 |
0.59 |
Mode Seeking |
0.23 |
0.97 |
0.38 |

CODE matching |
1 |
0.95 |
0.97 |